Handling Interrupts¶
Background¶
Embedded systems developers offload functionality from the application processor onto external devices whenever possible. These external devices may be on the same "chip" as the central processor (e.g., within a System-on-Chip) or they may just be on the same board, but the point here is that they are not the processor executing the application. Offloading work to these other devices enables us to get more functionality implemented in a target platform that is usually very limited in resources. If the processor has to implement everything we might miss deadlines or perhaps not fit into the available code space. And, of course, some specialized functionality may simply require an external device, such as a sensor.
For a simple example, a motor encoder is a device attached to a motor shaft that can be used to count the number of full or partial rotations that the shaft has completed. When the shaft is rotating quickly, the application would need to interact with the encoder frequently to get an up-to-date count, representing a non-trivial load on the application processor. There are ways to reduce that load, which we discuss shortly, but by far the simplest and most efficient approach is to do it all in hardware: use a timer device driven directly by the encoder. The timer is connected to the encoder such that the encoder signals act like an external clock driving the timer's internal counter. All the application processor must do to get the encoder count is query the timer's counter. The timer is almost certainly memory-mapped, so querying the timer amounts to a memory access.
In some cases, we even offload communication with these external devices onto other external devices. For example, the I2C (Inter-Integrated Circuit) protocol is a popular two-wire serial protocol for communicating between low-level hardware devices. Individual bits of the data are sent by driving the data line high and low in time with the clock signal on the other line. The protocol has been around for a long time and many embedded devices use it to communicate. We could have the application drive the data line for each individual bit in the protocol. Known as "bit-banging," that would be a significant load on the processor when the overall traffic volume is non-trivial. Fortunately, there are dedicated devices — I2C transceivers — that will implement the protocol for us. To send application data to another device using the I2C protocol, we just give the transceiver the data and destination address. The rest is done in the transceiver hardware. Receiving data is of course also possible. I2C transceivers are ubiquitous because the protocol is so common among device implementations. A USART / UART is a similar example.
Having offloaded some of the work, the application must have some way to interact with the device in order to know what is happening. Maybe the application has requested the external device perform some service — an analog-to-digital conversion, say — and must know when that function has completed. Maybe a communications device is receiving incoming data for the application to process. Or maybe that communications device has completed sending outgoing data and is ready for more to send.
Ultimately, interaction with the external device will be either synchronous or asynchronous, and has system-level design implications.
For synchronous interaction, the application periodically queries the device, typically a status flag or function on the device. Known as "polling," this approach is simple to implement but wastes cycles when the external device has not yet completed the request. After all, the point of offloading the work is to allow the application processor to execute other functionality. Polling negates that benefit. On the other hand, if the expected time to completion is extremely short, polling can be sufficiently efficient to make sense.
Usually, there's enough time involved so that polling is undesirable. The external environment takes time to respond and change state. Maybe a sensor has been designed to wait passively for something to happen in the external world, and only on the infrequent occurrence of that event should the application be notified. Perhaps a switch is to be toggled in certain circumstances, or an intruder detected. In this case, nothing happens for extended intervals.
As a consequence of all this, there's a very good chance that the internal processor should not poll these external devices.
Before we discuss the asynchronous alternative, there's another issue to consider. However the notification from the external device is implemented, a very quick response from the internal processor may be required. Think back to that serial port with a USART again. The USART is responsible for composing the arriving characters (or bytes) from their individual incoming bits on the receiving line. When all the bits for a single character have arrived, what happens next depends on the software design. In the simplest case, the internal processor copies the single character from the USART to an internal buffer and then goes back to doing something else while the next full character arrives in the USART. The response to the USART must be fairly quick because the next incoming character's bits are arriving. The internal processor must get the current character before it is overwritten by the next arriving character, otherwise we'll lose data. So we can say that the response to the notification from the external device must often be very quick.
Now, ideally in the USART case, we would further offload the work from the internal processor. Instead of having the processor copy each arriving character from the USART into an application buffer, we would have another external hardware device — a direct memory access (DMA) device — copy each arriving character from the USART to the buffer. A DMA device copies data from one location to another, in this case from the address of the USART's one-character memory-mapped register to the address of the application buffer in memory. The copy is performed by the DMA hardware so it is extremely fast and costs the main processor no cycles. But even with this approach, we need to notify the application that a complete message is ready for processing. We might need to do that quickly so that enough time remains for the application to process the message content prior to the arrival of the next message.
Therefore, the general requirement is for an external device to be able to asynchronously notify the internal processor, and for the notification to be implemented in such a way that the beginning of the response can be sufficiently and predictably quick.
Fortunately, computers already have such a mechanism: interrupts. The details vary considerably with the hardware architecture, but the overall idea is independent of the ISA: an external event can trigger a response from the processor by becoming "active." The current state of the application is temporarily stored, and then an interrupt response routine, known as an "interrupt handler" is executed. Upon completion of the handler, the original state of the application is restored and the application continues execution. The time between the interrupt becoming active and the start of the responding handler execution is known as the "interrupt latency."
Hardware interrupts typically have priorities assigned, depending on the hardware. These priorities are applied when multiple interrupts are triggered at the same time, to define the order in which the interrupts are presented and the handlers invoked. The canonical model is that only higher-priority interrupts can preempt handlers executing in response to interrupts with lower or equal priority.
Ada defines a model for hardware interrupts and interrupt handling that closely adheres to the conceptual model described above. If you have experience with interrupt handling, you will recognize them in the Ada model. One very important point to make about the Ada facilities is that they are highly portable, so they don't require extensive changes when moving to a new target computer. Part of that portability is due to the language-defined model.
Before we go into the Ada facility details, there's a final point. Sometimes we do want the application to wait for the external device. When would that be the case? To answer that, we need to introduce another term. The act of saving and restoring the state of the interrupted application software is known as "interrupt context switching." If the time for the device to complete the application request is approximately that of the context switching, the application might as well wait for the device after issuing the request.
Another reason to consider polling is that the architectural complexity of interrupt handling is greater than that of polling. If your system has some number of devices to control and polling them would be fast enough for the application to meet requirements, it is simpler to do so. But that will likely only work for a few devices, or at least a few that have short response time requirements.
The application code can wait for the device by simply entering a loop, exiting only when some external device status flag indicates completion of the function. The loop itself, in its simplest form, would contain only the test for exiting. As mentioned earlier, polling in a tight loop like this only makes sense for very fast device interactions. That's not the usual situation though, so polling should not be your default design assumption. Besides, active polling consumes power. On an embedded platform, conserving power is often important.
That loop polling the device will never exit if the device can fail to signal completion. Or maybe it might take too long in some odd case. If you don't want to be potentially stuck in the loop indefinitely, chewing up cycles and power, you can add an upper bound on the number of attempts, i.e., loop iterations. For example:
procedure Await_Data_Ready (This : in out Three_Axis_Gyroscope) is
Max_Status_Attempts : constant := 10_000;
-- This upper bound is arbitrary but must be sufficient for the
-- slower gyro data rate options and higher clock rates. It need
-- not be as small as possible, the point is not to hang forever.
begin
Polling: for K in 1 .. Max_Status_Attempts loop
if Data_Status (This).ZYX_Available then
return;
end if;
end loop Polling;
raise Gyro_Failure;
end Await_Data_Ready;
In the above, Data_Status is a function that returns a record
object containing Boolean flags. The if-statement queries one of those
flags. Thus the loop either detects the desired device status or raises
an exception after the maximum number of attempts have been made. In
this version, the maximum is a known upper bound so a local constant will
suffice. The maximum could be passed as a parameter instead, or declared in a global "configuration" package containing such constants.
Presumably, the upper bound on the attempts is either specified by the device documentation or empirically determined. Sometimes, however, the documentation will instead specify a maximum possible response time, for instance 30 milliseconds. Any time beyond that maximum indicates a device failure.
In the code above, the number of iterations indirectly defines the amount of elapsed time the caller waits. That time varies with the target's system clock and the generated instructions' required clock cycles, hence the approach is not portable. Alternatively, we can work in terms of actual time, which will be portable across all targets with a sufficiently precise clock.
You can use the facilities in package Ada.Real_Time to work with
time values. That package defines a type Time_Span representing
time intervals, useful for expressing relative values such as elapsed
time. There is also type Time representing an absolute value on
the timeline. A function Clock returns a value of type
Time representing "now," along with overloaded addition and
subtraction operators taking Time and Time_Span
parameters. The package also provides operators for comparing
Time values. (The value returned by Clock is monotonically
increasing so you don't need to handle time zone jumps and other such
things, unlike the function provided by Ada.Calendar.)
If the timeout is not context-specific then we'd use a constant as we did above, otherwise we'd allow the caller to specify the timeout. For example, here's a polling routine included with the DMA device driver we've mentioned a few times now. Some device-specific parts have been removed to keep the example simple. The appropriate timeout varies, so it is a parameter to the call:
procedure Poll_For_Completion
(This : in out DMA_Controller;
Stream : DMA_Stream_Selector;
Timeout : Time_Span;
Result : out DMA_Error_Code)
is
Deadline : constant Time := Clock + Timeout;
begin
Result := DMA_No_Error; -- initially
Polling : loop
exit Polling when Status (This, Stream, Transfer_Complete_Indicated);
if Clock >= Deadline then
Result := DMA_Timeout_Error;
return;
end if;
end loop Polling;
Clear_Status (This, Stream, Transfer_Complete_Indicated);
end Poll_For_Completion;
In this approach, we compute the deadline as a point on the timeline by
adding the value returned from the Clock function (i.e., "now")
to the time interval specified by the parameter. Then, within the loop,
we compare the value of the Clock to that deadline.
Finally, with another design approach we can reduce the processor cycles "wasted" when the polled device is not yet ready. Specifically, in the polling loop, when the device has not yet completed the requested function, we can temporarily relinquish the processor so that other tasks within the application can execute. That isn't perfect because we're still checking the device status even though we cannot exit the loop. And it requires other tasks to exist in your design, although that's probably a good idea for other reasons (e.g., logical threads having different, non-harmonic periods). This approach would look like this (an incomplete example):
procedure Poll_With_Delay is
Next_Release : Time;
Period : constant Time_Span := Milliseconds (30); -- let's say
begin
Next_Release := Clock;
loop
exit when Status (...);
Next_Release := Next_Release + Period;
delay until Next_Release;
end loop;
end Poll_With_Delay;
The code above will check the status of some device every 30
milliseconds (an arbitrary period just for illustration) until the
Status function result allows the loop to exit. If the device
"hangs" the loop is never exited, but as you saw there are ways to
address that possibility. When the code does not exit the loop, the next
point on the timeline is computed and the task executing the code then
suspends, allowing the other tasks in the application to execute.
Eventually, the next release point is reached and so the task becomes
ready to execute again (and will, subject to priorities).
But how long should the polling task suspend when awaiting the device? We need to suspend long enough for the other tasks to get something done, but not so long that the device isn't handled fast enough. Finding the right balance is often not simple, and is further complicated by the "task switching" time. That's the time it takes to switch the execution context from one task to another, in this case in response to the "delay until" statement suspending the polling task. And it must be considered in both directions: when the delay expires we'll eventually switch back to the polling task.
As you can see, polling is easily expressed but has potentially significant drawbacks and architectural ramifications so it should be avoided as a default approach.
Now let's explore the Ada interrupt facilities.
Language-Defined Interrupt Model¶
The Ada language standard defines a model for hardware interrupts, as well as language-defined mechanisms for handling interrupts consistent with that model. The model is defined in Annex C, the "Systems Programming" annex, section 3 "Interrupt Support." The following is the text of that section with only a few simplifications and elisions.
Interrupts are said to occur. An occurrence of an interrupt is separable into generation and delivery.
Generation of an interrupt is the event in the underlying hardware or system that makes the interrupt available to the program.
Delivery is the action that invokes part of the program as response to the interrupt occurrence.
Between generation and delivery, the interrupt occurrence is pending.
Some or all interrupts may be blocked. When an interrupt is blocked, all occurrences of that interrupt are prevented from being delivered.
Certain interrupts are reserved. A reserved interrupt is either an interrupt for which user-defined handlers are not supported, or one which already has an attached handler by some other RTL-defined means. The set of reserved interrupts is determined by the hardware and run-time library (RTL).
Program units can be connected to non-reserved interrupts. While connected, the program unit is said to be attached to that interrupt. The execution of that program unit, the interrupt handler, is invoked upon delivery of the interrupt occurrence.
While a handler is attached to an interrupt, it is called once for each delivered occurrence of that interrupt.
The corresponding interrupt is blocked while the handler executes. While an interrupt is blocked, all occurrences of that interrupt are prevented from being delivered. Whether such occurrences remain pending or are lost is determined by the hardware and the RTL.
Each interrupt has a default treatment which determines the system's response to an occurrence of that interrupt when no user-defined handler is attached. The set of possible default treatments is defined by the RTL.
An exception propagated from a handler that is invoked by an interrupt has no effect. In particular, it is not propagated out of the handler, in the same way that exceptions do not propagate outside of task bodies.
If the
Ceiling_Lockingpolicy is in effect, the interrupt handler executes with the active priority that is the ceiling priority of the corresponding protected object. ("Protected object" is abbreviated as "PO" for convenience).If the hardware or the underlying system holds pending interrupt occurrences, the RTL must provide for later delivery of these occurrences to the program.
(The above is not everything in the model but we can ignore the rest in this introduction.)
Because interrupt occurrences are generated by the hardware and delivered by the underlying system software (run-time library or real-time operating system), the application code is mainly responsible for responding to occurrences. Of course, the application must first configure the relevant external devices so that they generate the expected interrupts.
The actual response is application-specific but is also hardware-specific. The latter often (but not always) requires clearing the interrupt status within the generating device so that the same occurrence is not delivered again.
Furthermore, the standard model requires the underlying software to block further occurrences while the handler executes, and only allow preemption by higher-priority interrupt occurrences (if any). The application handlers are not responsible for these semantics either. As you will see, the choice of program unit used for expressing handlers makes this all very convenient for the developer.
As a consequence, in terms of the response, the application developer must write the specific handlers and attach those handlers to the corresponding interrupts. Attaching the handlers is implemented in the underlying system software, and it is this same underlying software that delivers the occurrences.
We will now explore the Ada facilities in detail. At the end of this chapter we will explore some common idioms using these mechanisms, especially with regard to the handlers' interaction with the rest of the application.
Interrupt Handlers¶
Interrupt handling is, by definition, asynchronous: some event occurs that causes the processor to suspend the application, respond to the event, and then resume application execution.
Because these events are asynchronous, the actions performed by the interrupt handler and the application are subject to the same sorts of race conditions as multiple tasks acting on shared data.
For example, a "reader" task may be in the act of reading (copying) the value of some shared variable, only to be preempted by a "writer" task that updates the value of the variable. In that case, when the "reader" task resumes execution, it will finish the read operation but will, as a result, have a value that is partly from the old value and partly from the new value. The effect is unpredictable. An interrupt handler can have the same effect on shared data as the preempting "writer" task that interrupts the "reader" task. This problem is possible for shared data of any type that is not atomically read or written. You can think of large record objects if that helps, but it even applies to some scalars.
That scenario applies even if no explicit tasks are declared in the application. That's because an implicit "environment task" is executing the main subprogram. In that case, the main subprogram is the entire application, but more typically some non-null application code is actively executing in one or more tasks.
But it's not just a matter of tasks. We said that interrupts usually have priorities. Typically that means a higher-priority interrupt will preempt the execution of the handler for a lower-priority interrupt. It's the same issue.
Furthermore, the fact that an interrupt has occurred needs to be communicated to the application, for example to say that updated data are available, perhaps a sensor reading or characters from a serial port. As we said above, we usually don't want to poll for that fact, so the application must be able to suspend until the event has occurred. Often we'll have a dedicated task within the application that suspends, rather than the entire application, but that's an application detail.
Ada's protected objects address all these asynchronous issues. Shared data declared within a protected object can be accessed only via protected procedures or protected entries, both of which execute with mutually exclusive access. Hence no race conditions are possible.
Here is an extremely simple, but realistic, example of a PO. This is not an interrupt handler example — we'll get to that — but it does show a shared variable and a protected procedure that executes with mutually exclusive access no matter how many tasks concurrently call it. The PO provides unique serial numbers.
protected Serial_Number is
procedure Get_Next (Number : out Positive);
private
Value : Positive := 1;
end Serial_Number;
protected body Serial_Number is
procedure Get_Next (Number : out Positive) is
begin
Number := Value;
Value := Value + 1;
end Get_Next;
end Serial_Number;
Imagine there are multiple assembly lines creating devices of various
sorts. Each device gets a unique serial number. These assembly lines run
concurrently, so the calls to Get_Next occur concurrently. Without
mutually exclusive access to the Value variable, multiple devices
could get the same serial number.
Protected entries can suspend a caller until some condition is true; in this case, the fact that an interrupt has occurred and been handled. (As we will see, a protected entry is not the only way to synchronize with an accessing task, but it is the most robust and general.)
Here's an example of a PO with a protected entry:
protected type Persistent_Signal is
entry Wait;
procedure Send;
private
Signal_Arrived : Boolean := False;
end Persistent_Signal;
protected body Persistent_Signal is
entry Wait when Signal_Arrived is
begin
Signal_Arrived := False;
end Wait;
procedure Send is
begin
Signal_Arrived := True;
end Send;
end Persistent_Signal;
This is a PO providing a "Persistent Signal" abstraction. It allows a
task to wait for a "signal" from another task. The signal is not lost if
the receiving task is not already waiting, hence the term "persistent."
Specifically, if Signal_Arrived is False, a caller to Wait
will be suspended until Signal_Arrived becomes True. A caller to
Send sets Signal_Arrived to True. If a caller to
Wait was already present, suspended, it will be allowed to
continue execution. If no caller was waiting, eventually some caller
will arrive, find Signal_Arrived True, and will be allowed to
continue. In either case, the Signal_Arrived flag will be set back
to False before the Wait caller is released. Protected objects
can have a priority assigned, similar to tasks, so they are integrated
into the global priority semantics including interrupt priorities.
Therefore, in Ada an interrupt handler is a protected procedure declared within some protected object (PO). A given PO may handle more than one interrupt, and if so, may use one or more protected procedures to do so.
Interrupts can be attached to a protected procedure handler using a mechanism we'll discuss shortly. When the corresponding interrupt occurs, the attached handler is invoked. Any exceptions propagated by the handler's execution are ignored and do not go past the procedure.
While the protected procedure handler executes, the corresponding interrupt is blocked. As a consequence, another occurrence of that same interrupt will not preempt the handler's execution. However, if the hardware does not allow interrupts to be blocked, no blocking occurs and a subsequent occurrence would preempt the current execution of the handler. In that case, your handlers must be written with that possibility in mind. Most targets do block interrupts so we will assume that behavior in the following descriptions.
The standard mutually exclusive access provided to the execution of protected procedures and entries is enforced whether the "call" originates in hardware, via an interrupt, or in the application software, via some task. While any protected action in the PO executes, the corresponding interrupt is blocked, such that another occurrence will not preempt the execution of that actions' procedure or entry body execution in the PO.
On some processors blocked interrupts are lost, they do not persist. However, if the hardware can deliver an interrupt that had been blocked, the Systems Programming Annex requires the handler to be invoked again later, subject to the PO semantics described above.
The default treatment for a given interrupt depends on the RTL implementation. The default may be to jump immediately to a system-defined handler that merely loops forever, thereby "hanging" the system and preventing any further execution of the application. On a bare-board target that would be a very common approach. Alternatively the default could be to ignore the interrupt entirely.
As mentioned earlier, some interrupts may be reserved, meaning that the
application cannot install a replacement handler. For instance, most
bare-board systems include a clock that is driven by a dedicated
interrupt. The application cannot (or at least should not) override the
interrupt handler for that interrupt. The determination of which
interrupts are reserved is RTL-defined. Attempting to attach
a user-defined handler for a reserved interrupt raises Program_Error,
and the existing treatment is unchanged.
Interrupt Management¶
Ada defines a standard package that provides a primary type for
identifying individual interrupts, as well as subprograms that take a
parameter of that type in order to manage the system's interrupts and
handlers. The package is named Ada.Interrupts, appropriately.
The primary type in that package is named Interrupt_Id and is an
compiler-defined discrete type, meaning that it is either an
integer type (signed or not) or an enumeration type. That representation
is guaranteed so you can be sure that Interrupt_Id can be used,
for example, as the index for an array type.
Package Ada.Interrupts provides functions to query whether a
given interrupt is reserved, or if an interrupt has a handler attached.
Procedures are defined to allow the application to attach and detach
handlers, among other things. These procedures allow the application to
dynamically manage interrupts. For example, when a new external device is
added, perhaps as a "hot spare" replacing a damaged device, or when a
new external device is simply connected to the target, the application
can arrange to handle the new interrupts without having to recompile the
application or restart application execution.
However, typically you will not use these procedures or functions to
manage interrupts. In part that's because the architecture is usually
static, i.e., the handlers are set up once and then never changed. In
that case you won't need to query whether a given interrupt is reserved
at run-time, or to check whether a handler is attached. You'd know that
already, as part of the system architecture choices. For the same
reasons, another mechanism for attaching handlers is more commonly used,
and will be explained in that section. The package's type
Interrupt_Id, however, will be used extensively.
A child package Ada.Interrupts.Names defines a target-dependent
set of constants providing meaningful names for the Interrupt_Id values
the target supports. Both the number of constants and their names are
defined by the compiler, reflecting the variations in hardware
available. This package and the enclosed constants are used all the
time. For the sake of illustration, here is part of the package
declaration for a Cortex M4F microcontroller supported by GNAT:
package Ada.Interrupts.Names is
Sys_Tick_Interrupt : constant Interrupt_ID := 1;
...
EXTI0_Interrupt : constant Interrupt_ID := 8;
....
DMA1_Stream0_Interrupt : constant Interrupt_ID := 13;
...
HASH_RNG_Interrupt : constant Interrupt_ID := 80;
...
end Ada.Interrupts.Names;
Notice HASH_RNG_Interrupt, the name for Interrupt_Id value
80 on this target. That is the interrupt that the on-chip random number
generator hardware uses to signal that a new value is available. We will
use this interrupt in an example at the end of this chapter.
The representation chosen by the compiler for Interrupt_Id
is very likely an integer, as in the above package, so the child package
provides readable names for the numeric values. If Interrupt_Id
is represented as an enumeration type the enumeral values are probably
sufficiently readable, but the child package must be provided by the
vendor nonetheless.
Associating Handlers With Interrupts¶
As we mentioned above, the Ada standard provides two ways to attach handlers to interrupts. One is procedural, described earlier. The other mechanism is automatic, achieved during elaboration of the protected object enclosing the handler procedure. The behavior is not unlike the activation of tasks: declared tasks are activated automatically as a result of their elaboration, whereas dynamically allocated tasks are activated as a result of their allocations.
We will focus exclusively on the automatic, elaboration-driven attachment model because that is the more common usage, and as a result, that is what GNAT supports on bare-board targets. It is also the mechanism that the standard Ravenscar and Jorvik profiles require. Our examples are consistent with those targets.
In the elaboration-based attachment model, we specify the interrupt to be attached to a given protected procedure within a protected object. This interrupt specification occurs within the enclosing protected object declaration. (Details in a moment.) When the enclosing PO is elaborated, the run-time library installs that procedure as the handler for that interrupt. A given PO may contain one or more interrupt handler procedures, as well as any other protected subprograms and entries.
In particular, we can associate an interrupt with a protected procedure
by applying the aspect Attach_Handler to that procedure as part
of its declaration, with the Interrupt_Id value as the aspect
parameter. The association can also be achieved via a pragma with the
same name as the aspect. Strictly speaking, the pragma
Attach_Handler is obsolescent, but that just means that there is
a newer way to make the association (i.e., the aspect). The pragma is
not illegal and will remain supported. Because the pragma existed in a
version of Ada prior to aspects you will see a lot of existing code
using the pragma. You should become familiar with it. There's no
language-driven reason to change the source code to use the aspect. New
code should arguably use the aspect, but there's no technical reason to
prefer one over the other.
Here is an example of a protected object with one protected procedure
interrupt handler. It uses the Attach_Handler aspect to tie a
random number generator interrupt to the
RNG_Controller.Interrupt_Handler procedure:
protected RNG_Controller is
...
entry Get_Random (Value : out UInt32);
private
Last_Sample : UInt32 := 0;
Buffer : Ring_Buffer;
Data_Available : Boolean := False;
procedure Interrupt_Handler with
Attach_Handler => Ada.Interrupts.Names.HASH_RNG_Interrupt;
end RNG_Controller;
That's all that the developer must do to install the handler. The compiler and run-time library do the rest, automatically.
The local variables are declared in the private part, as required by the language, because they are shared data meant to be protected from race conditions. Therefore, the only compile-time access possible is via visible subprograms and entries declare in the visible part. Those subprograms and entries execute with mutually exclusive access so no race conditions are possible, as guaranteed by the language.
Note that procedure Interrupt_Handler is declared in the private
part of RNG_Controller, rather than the visible part. That
location is purely a matter of choice (unlike the variables), but there
is a good reason to hide it: application software can call an interrupt
handler procedure too. If you don't ever intend for that to happen, have
the compiler enforce your intent. An alert code reader will then recognize that
clients cannot call that procedure. If, on the other hand, the handler is
declared in the visible part, the reader must examine more of the code to
determine whether there are any callers in the application code. Granted, a
software call to an interrupt handler is rare, but not illegal, so you
should state your intent in the code in an enforceable manner.
Be aware that the Ada compiler is allowed to place restrictions on protected procedure handlers. The compiler can restrict the content of the procedure body, for example, or it might forbid calls to the handler from the application software. The rationale is to allow direct invocation by the hardware, to minimize interrupt latency to the extent possible.
For completeness, here's the same RNG_Controller protected object
using the pragma instead of the aspect to attach the interrupt to the
handler procedure:
protected RNG_Controller is
...
entry Get_Random (Value : out UInt32);
private
Last_Sample : UInt32 := 0;
Buffer : Ring_Buffer;
Data_Available : Boolean := False;
procedure Interrupt_Handler;
pragma Attach_Handler (Interrupt_Handler,
Ada.Interrupts.Names.HASH_RNG_Interrupt;
end RNG_Controller;
As you can see, there isn't much difference. The aspect is somewhat more succinct. (The choice of where to declare the procedure remains the same.)
In this attachment model, protected declarations containing interrupt
handlers must be declared at the library level. That means they must be
declared in library packages. (Protected objects cannot
be library units themselves, just as tasks cannot. They must be declared
within some other unit.) Here is the full declaration for the
RNG_Controller PO declared within a package — in this case
within a package body:
with Ada.Interrupts.Names;
with Bounded_Ring_Buffers;
package body STM32.RNG.Interrupts is
package UInt32_Buffers is new Bounded_Ring_Buffers (Content => UInt32);
use UInt32_Buffers;
protected RNG_Controller is
...
entry Get_Random (Value : out UInt32);
private
Last_Sample : UInt32 := 0;
Samples : Ring_Buffer (Upper_Bound => 9); -- arbitrary
Data_Available : Boolean := False;
procedure Interrupt_Handler with
Attach_Handler => Ada.Interrupts.Names.HASH_RNG_Interrupt;
end RNG_Controller;
...
end STM32.RNG.Interrupts;
But note that we're talking about protected declarations, a technical
term that encompasses not only protected types but also
anonymously-typed protected objects. In the RNG_Controller
example, the PO does not have an explicit type declared; it is
anonymously-typed. (Task objects can also be anonymously-typed.) You
don't have to use a two-step process of first declaring the type and
then an object of the type. If you only need one, no explicit type is
required.
Although interrupt handler protected types must be declared at library level, the Ada model allows you to have an object of the type declared elsewhere, not necessarily at library level. However, note that the Ravenscar and Jorvik profiles require protected interrupt handler objects — anonymously-typed or not — to be declared at the library level too, for the sake of analysis. The profiles also require the elaboration-based attachment mechanism we have shown. For the sake of the widest applicability, and because with GNAT the most likely use-case involves either Ravenscar or Jorvik, we are following those restrictions in our examples.
Interrupt Priorities¶
Many (but not all) processors assign priorities to interrupts, with blocking and preemption among priorities of different levels, much like preemptive priority-based task semantics. Consequently, the priority semantics for interrupt handlers are as if a hardware "task," executing at an interrupt level priority, calls the protected procedure handler.
Interrupt handlers in Ada are protected procedures, which do not have priorities individually, but the enclosing protected object can be assigned a priority that will apply to the handler(s) when executing.
Therefore, protected objects can have priorities assigned using values
of subtype System.Interrupt_Priority, which are high enough to
require the blocking of one or more interrupts. The specific values
among the priority subtypes are not standardized but the intent is that
interrupt priorities are higher (more urgent) than non-interrupt
priorities, as if they are declared like so in package System:
subtype Any_Priority is Integer range compiler-defined;
subtype Priority is Any_Priority
range Any_Priority'First .. compiler-defined;
subtype Interrupt_Priority is Any_Priority
range Priority'Last + 1 .. Any_Priority'Last;
For example, here are the subtype declarations in the GNAT compiler for an Arm Cortex M4 target:
subtype Any_Priority is Integer range 0 .. 255;
subtype Priority is Any_Priority range Any_Priority'First .. 240;
subtype Interrupt_Priority is Any_Priority range
Priority'Last + 1 .. Any_Priority'Last;
Although the ranges are compiler-defined, when the Systems
Programming Annex is implemented the range of
System.Interrupt_Priority must include at least one value.
Vendors are not required to have a distinct priority value in
Interrupt_Priority for each hardware interrupt possible on a
given target. On a bare-metal target, they probably will have a
one-to-one correspondence, but might not in a target with an RTOS or
host OS.
A PO containing an interrupt handler procedure must be given a priority
within the Interrupt_Priority subtype's range. To do so, we apply
the aspect Interrupt_Priority to the PO. Perhaps confusingly, the
aspect and the value's required subtype have the same name.
with Ada.Interrupts.Names; use Ada.Interrupts.Names;
with System; use System;
package Gyro_Interrupts is
protected Handler with
Interrupt_Priority => Interrupt_Priority'Last
is
private
procedure IRQ_Handler;
pragma Attach_Handler (IRQ_Handler, EXTI2_Interrupt);
end Handler;
end Gyro_Interrupts;
The code above uses the highest (most urgent) interrupt priority value
but some other value could be used instead, as long as it is in the
Interrupt_Priority subtype's range. Constraint_Error is
raised otherwise.
There is also an alternative pragma, now obsolescent, with the same name as the aspect and subtype. Here is an example:
with Ada.Interrupts.Names; use Ada.Interrupts.Names;
package Gyro_Interrupts is
protected Handler is
pragma Interrupt_Priority (245);
private
procedure IRQ_Handler;
pragma Attach_Handler (IRQ_Handler, EXTI2_Interrupt);
end Handler;
end Gyro_Interrupts;
In the above we set the interrupt priority to 245, presumably a value conformant with this specific target. You should be familiar with this pragma too, because there is so much existing code using it. New code should use the aspect, ideally.
If we don't specify the priority for some protected object containing an
interrupt handler (using either the pragma or the aspect), the initial
priority of protected objects of that type is compiler-defined,
but within the range of the subtype Interrupt_Priority. Generally
speaking, you should specify the priorities per those of the interrupts
handled, assuming they have distinct values, so that you can reason
concretely about the relative blocking behavior at run-time.
Note that the parameter specifying the priority is optional for the
Interrupt_Priority pragma. When none is given, the effect is as
if the value Interrupt_Priority'Last was specified.
with Ada.Interrupts.Names; use Ada.Interrupts.Names;
package Gyro_Interrupts is
protected Handler is
pragma Interrupt_Priority;
private
...
end Handler;
end Gyro_Interrupts;
No pragma parameter is given in the above, therefore
Gyro_Interrupts.Handler executes at Interrupt_Priority'Last
when invoked.
While an interrupt handler is executing, the corresponding interrupt is blocked. Therefore, the same interrupt will not be delivered again while the handler is executing. Plus, the protected object semantics mean that no software caller is also concurrently executing within the protected object. So no data race conditions are possible. If the system does not support blocking, however, the interrupt is not blocked when the handler executes.
In addition, when interrupt priorities are involved, hardware blocking typically extends to interrupts of equal or lower priority.
You should understand that a higher-priority interrupt could preempt the execution of a lower-priority interrupt's handler. Handlers do not define "critical sections" in which the processor cannot be preempted at all (other than the case of the highest priority interrupt).
Preemption does not cause data races, usually, because the typical case is to have a given protected object handle only one interrupt. It follows that only that one interrupt handler has visibility to the protected data in any given protected object, therefore only that one handler can update it. Any preempting handler would be in a different protected object, hence the preempting handler could not possibly update the data in the preempted handler's PO. No data race condition is possible.
However, protected objects can contain handlers for more than one interrupt. In that case, depending on the priorities, the execution of a higher-priority handler could preempt the execution of a lower priority handler in that same PO. Because each handler in the PO can update the local protected data, these data are effectively shared among asynchronous writers. Data race conditions are, as a result, possible.
The solution to the case of multiple handlers in a single PO is to assign the PO a priority not less than the highest of the interrupt priorities for which it contains handlers. That's known as the "ceiling priority" and works the same as when applying the ceiling for the priorities of caller tasks in the software. Then, whenever any interrupt handled by that PO is delivered, the handler executes at the ceiling priority, not necessarily the priority of the specific interrupt handled. All interrupts at a priority equal or lower than the PO priority are blocked, so no preemption by another handler within that same PO is possible. As a result, a handler for a higher priority interrupt must be in a different PO. If that higher priority handler is invoked, it can indeed preempt the execution of the handler for the lower priority interrupt in another PO. But because these two handlers will not be in the same PO, they will not share the data, so again no race condition is possible.
Note also that software callers will execute at the PO priority as well, so their priority may be increased during that execution. As you can see, the Ceiling Priority Protocol integrates application-level priorities, for tasks and protected objects, with interrupt-level priorities for interrupt handlers.
The Ceiling Locking Protocol is requested by specifying the
Ceiling_Locking policy (see ARM D.3) to the pragma
Locking_Policy. Both Ravenscar and Jorvik do so, automatically.
Common Design Idioms¶
In this section we explore some of the common idioms used when writing interrupt handlers in Ada.
Parameterizing Handlers¶
Suppose we have more than one instance of a kind of device. For example, multiple DMA controllers are often available on a System-on-Chip such as an Arm microcontroller. We can simplify our code by defining a device driver type, with one object of the type per supported hardware device. This is the same abstract data type (ADT) approach we'd take for software objects in application code, and in general for device drivers when multiple hardware instances are available.
We can also apply the ADT approach to interrupt handlers when we have multiple devices of a given kind that can generate interrupts. In this case, the type will be fully implemented as a protected type containing at least one interrupt handling procedure, with or without additional protected procedures or entries.
As is the case with abstract data types in general, we can tailor each
object with discriminants defined with the type, in order to
"parameterize" the type and thus allow distinct objects to have
different characteristics. For example, we might define a bounded buffer
ADT with a discriminant specifying the upper bound, so that distinct
objects of the single type could have different bounds. In the case of
hardware device instances, one of these parameters will often specify
the device being driven, but we can also specify other device-specific
characteristics. In particular, for interrupt handler types both the
interrupt to handle and the interrupt priority can be discriminants.
That's possible because the aspects/pragmas do not require their values
to be specified via literals, unlike what was done in the
RNG_Controller example above.
For example, here is the declaration for an interrupt handler ADT named
DMA_Interrupt_Controller. This type manages the interrupts for a
given DMA device, known as a DMA_Controller. Type
DMA_Controller is itself an abstract data type, declared
elsewhere.
protected type DMA_Interrupt_Controller
(Controller : not null access DMA_Controller;
Stream : DMA_Stream_Selector;
IRQ : Ada.Interrupts.Interrupt_Id;
IRQ_Priority : System.Interrupt_Priority)
with
Interrupt_Priority => IRQ_Priority
is
procedure Start_Transfer
(Source : Address;
Destination : Address;
Data_Count : UInt16);
procedure Abort_Transfer (Result : out DMA_Error_Code);
procedure Clear_Transfer_State;
function Buffer_Error return Boolean;
entry Wait_For_Completion (Status : out DMA_Error_Code);
private
procedure Interrupt_Handler with Attach_Handler => IRQ;
No_Transfer_In_Progess : Boolean := True;
Last_Status : DMA_Error_Code := DMA_No_Error;
Had_Buffer_Error : Boolean := False;
end DMA_Interrupt_Controller;
In the above, the Controller discriminant provides an access
value designating the specific DMA_Controller device instance to
be managed. Each DMA device supports multiple independent conversion
"streams" so the Stream discriminant specifies that
characteristic. The IRQ and IRQ_Priority discriminants
specify the handler values for that specific device and stream. These
discriminant values are then used in the Interrupt_Priority
pragma and the Attach_Handler aspect in the private part. ("IRQ"
is a common handler name across programming languages, and is an
abbreviation for "interrupt request.")
Here then are the declarations for two instances of the interrupt handler type:
DMA2_Stream0 : DMA_Interrupt_Controller
(Controller => DMA_2'Access,
Stream => Stream_0,
IRQ => DMA2_Stream0_Interrupt,
IRQ_Priority => Interrupt_Priority'Last);
DMA2_Stream5 : DMA_Interrupt_Controller
(Controller => DMA_2'Access,
Stream => Stream_5,
IRQ => DMA2_Stream5_Interrupt,
IRQ_Priority => Interrupt_Priority'Last);
In the above, both objects DMA2_Stream0 and DMA2_Stream5
are associated with the same object named DMA2, an instance of
the DMA_Controller type. The difference in the objects is the
stream that generates the interrupts they handle. One object handles
Stream_0 interrupts and the other handles those from
Stream_5. Package Ada.Interrupts.Names for this target
(for GNAT) declares distinct names for the streams and devices
generating the interrupts, hence DMA2_Stream0_Interrupt and
DMA2_Stream5_Interrupt.
On both objects the priority is the highest interrupt priority (and
hence the highest overall), Interrupt_Priority'Last. That will
work, but of course all interrupts will be blocked during the execution
of the handler, as well as the execution of any other subprogram or
entry in the same PO. That means that the clock interrupt is blocked for
that interval, for example. We use that interrupt value in our
demonstrations for expedience, but in a real application you'd almost
certainly use a lower value specific to the interrupt handled.
We could reduce the number of discriminants, and also make the code more
robust, by taking advantage of the requirement that type
Interrupt_Id be a discrete type. As such, it can be used as
the index type into arrays. Here is a driver example with only the
Interrupt_Id discriminant required:
Device_Priority : constant array (Interrupt_Id) of Interrupt_Priority := ( ... );
protected type Device_Interface
(IRQ : Interrupt_Id)
with
Interrupt_Priority => Device_Priority (IRQ)
is
procedure Handler with Attach_Handler => IRQ;
...
end Device_Interface;
Now we use the one IRQ discriminant both to assign the priorities
for distinct objects and to attach their handler procedures.
Multi-Level Handlers¶
Interrupt handlers are intended to be very brief, in part because they prevent lower priority interrupts and application tasks from executing.
However, complete interrupt processing may require more than just the short protected procedure handler’s activity. Therefore, two levels of handling are common: the protected procedure interrupt handler and a task. The handler does the least possible and then signals the task to do the rest.
Of course, sometimes the handler does everything required and just needs to signal the application. In that case, the awakened task does no further "interrupt processing" but simply uses the result.
Regardless, the same issues apply: 1) How do application tasks synchronize with the handlers? Assuming the task is not polling the event, at some point the task must stop what it was doing and suspend, waiting for the handler to signal it. 2) Once synchronized, how can the handlers pass data to the tasks?
Using protected objects for interrupt handling provides an efficient mechanism that elegantly addresses both issues. In addition, when data communication is not required, another standard language mechanism is available. These give rise to two design idioms. We will explore both.
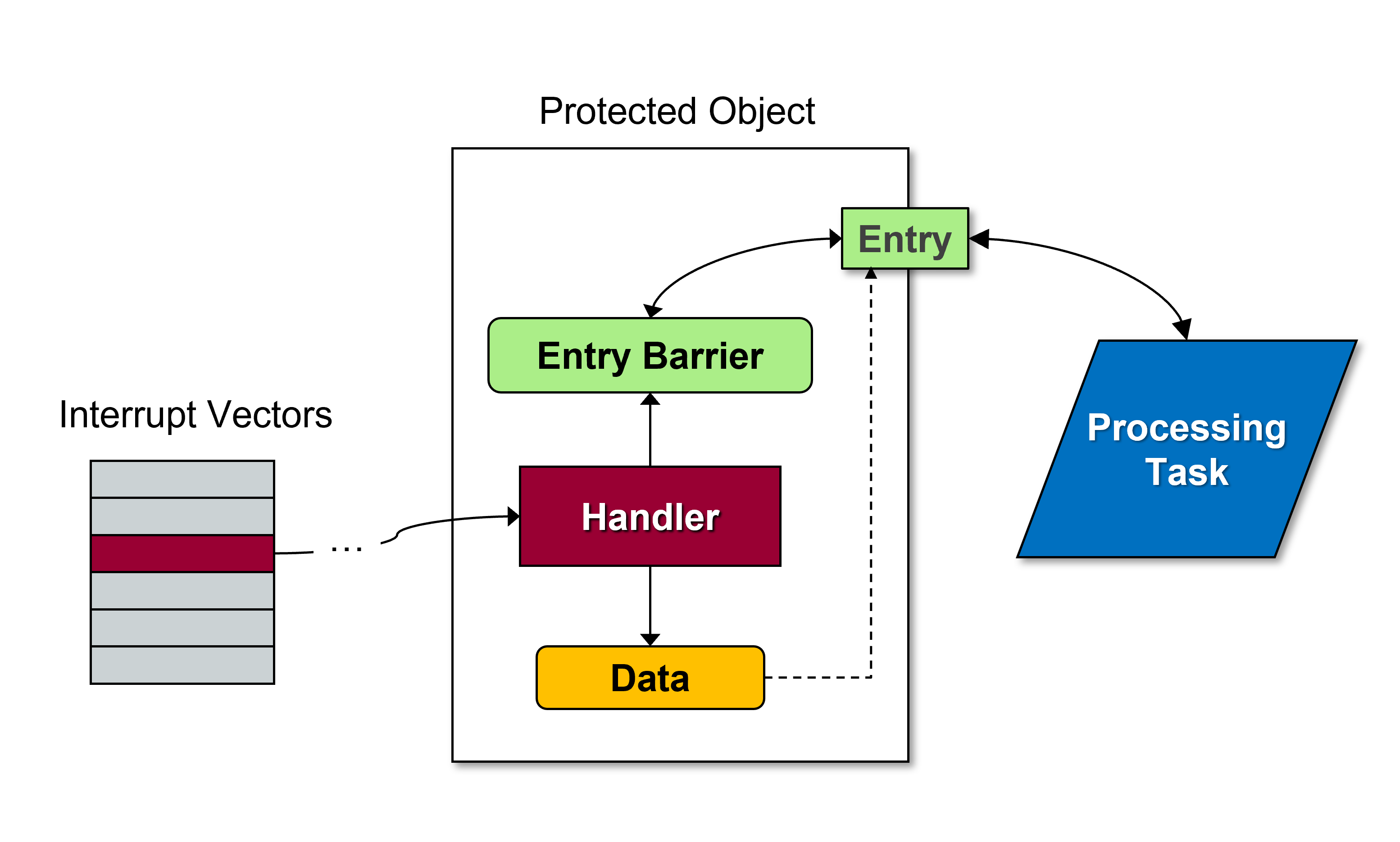
In the first idiom, the protected object contains a protected entry as
well as the interrupt handler procedure. The task suspends on the entry
when ready for the handler results, controlled by the barrier condition
as usual. The protected handler procedure responds to interrupts,
managing data (if any) as required. When ready, based on what the
handler does, the handler sets the entry barrier to True. That allows
the suspended task to execute the entry body. The entry body can do
whatever is required, possibly just copying the local protected data to
the entry parameters. Of course, the entry may be used purely for
synchronizing with the handler, i.e., suspending and resuming the task,
in which case there would be no parameters passed.
The image below depicts this design.
The DMA_Interrupt_Controller described earlier actually uses this
design.
protected type DMA_Interrupt_Controller
(Controller : not null access DMA_Controller;
Stream : DMA_Stream_Selector;
IRQ : Ada.Interrupts.Interrupt_Id;
IRQ_Priority : System.Interrupt_Priority)
with
Interrupt_Priority => IRQ_Priority
is
procedure Start_Transfer
(Source : Address;
Destination : Address;
Data_Count : UInt16);
procedure Abort_Transfer (Result : out DMA_Error_Code);
procedure Clear_Transfer_State;
function Buffer_Error return Boolean;
entry Wait_For_Completion (Status : out DMA_Error_Code);
private
procedure Interrupt_Handler with Attach_Handler => IRQ;
No_Transfer_In_Progess : Boolean := True;
Last_Status : DMA_Error_Code := DMA_No_Error;
Had_Buffer_Error : Boolean := False;
end DMA_Interrupt_Controller;
The client application code (task) calls procedure
Start_Transfer to initiate the DMA transaction, then presumably
goes off to accomplish something else, and eventually calls the
Wait_For_Completion entry. That call blocks the task if the
device has not yet completed the DMA transfer. The interrupt handler
procedure, cleverly named Interrupt_Handler, handles the
interrupts, one of which indicates that the transfer has completed.
Device errors also generate interrupts so the handler detects them and
acts accordingly. Eventually, the handler sets the barrier to True and
the task can get the status via the entry parameter.
procedure Start_Transfer
(Source : Address;
Destination : Address;
Data_Count : UInt16)
is
begin
No_Transfer_In_Progess := False;
Had_Buffer_Error := False;
Clear_All_Status (Controller.all, Stream);
Start_Transfer_with_Interrupts
(Controller.all,
Stream,
Source,
...,
Enabled_Interrupts =>
(Half_Transfer_Complete_Interrupt => False,
others => True));
end Start_Transfer;
entry Wait_For_Completion
(Status : out DMA_Error_Code)
when
No_Transfer_In_Progress
is
begin
Status := Last_Status;
end Wait_For_Completion;
In the above, the entry barrier consists of the Boolean variable
No_Transfer_In_Progress. Procedure Start_Transfer first
sets that variable to False so that a caller to
Wait_For_Completion will suspend until the transaction completes
one way or the other. Eventually, the handler sets
No_Transfer_In_Progress to True.
procedure Interrupt_Handler is
subtype Checked_Status_Flag is DMA_Status_Flag with
Static_Predicate => Checked_Status_Flag /= Half_Transfer_Complete_Indicated;
begin
for Flag in Checked_Status_Flag loop
if Status (Controller.all, Stream, Flag) then
case Flag is
when FIFO_Error_Indicated =>
Last_Status := DMA_FIFO_Error;
Had_Buffer_Error := True;
No_Transfer_In_Progess := not Enabled (Controller.all, Stream);
when Direct_Mode_Error_Indicated =>
Last_Status := DMA_Direct_Mode_Error;
No_Transfer_In_Progess := not Enabled (Controller.all, Stream);
when Transfer_Error_Indicated =>
Last_Status := DMA_Transfer_Error;
No_Transfer_In_Progess := True;
when Transfer_Complete_Indicated =>
Last_Status := DMA_No_Error;
No_Transfer_In_Progess := True;
end case;
Clear_Status (Controller.all, Stream, Flag);
end if;
end loop;
end Interrupt_Handler;
This device driver doesn't bother with interrupts indicating that
transfers are half-way complete so that specific status flag is
ignored. In response to an interrupt, the handler checks each status
flag to determine what happened. Note the resulting assignments for
both the protected variables Last_Status and
No_Transfer_In_Progess. The variable
No_Transfer_In_Progess controls the entry, and
Last_Status is passed to the caller via the entry formal
parameter. When the interrupt handler exits, the resulting protected
action allows the now-enabled entry call to execute.
In the second design idiom, the handler again synchronizes with the application task, but not using a protected entry.
The image below depicts this design.
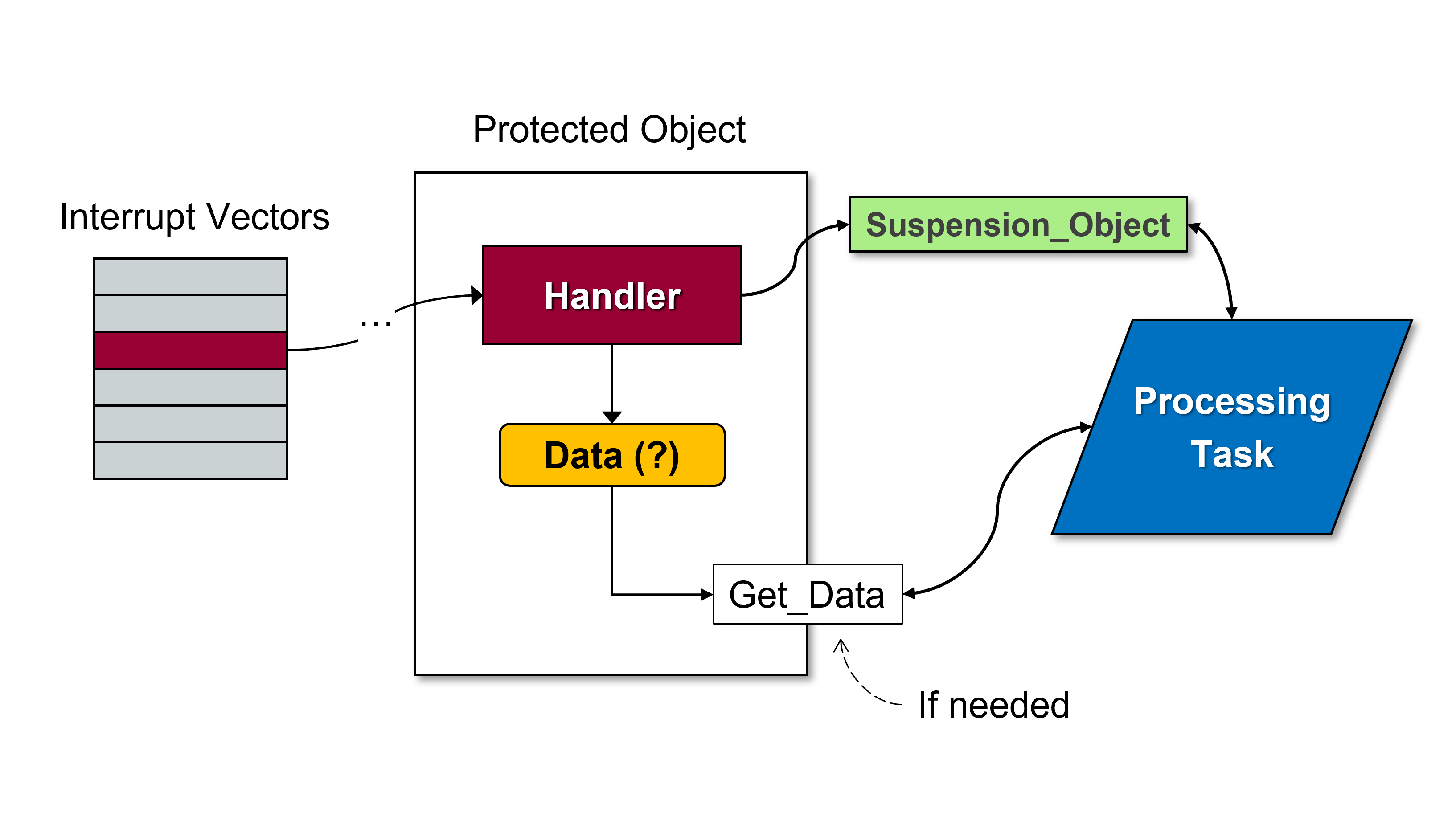
In this approach, the task synchronizes with the handler using a
Suspension_Object variable. The type Suspension_Object is
defined in the language standard package
Ada.Synchronous_Task_Control. Essentially, the type provides a
thread-safe Boolean flag. Callers can suspend themselves (hence the
package name) until another task resumes them by setting the flag to
True. Here's the package declaration, somewhat elided:
package Ada.Synchronous_Task_Control is
type Suspension_Object is limited private;
procedure Set_True (S : in out Suspension_Object);
procedure Set_False (S : in out Suspension_Object);
function Current_State (S : Suspension_Object) return Boolean;
procedure Suspend_Until_True (S : in out Suspension_Object);
private
...
end Ada.Synchronous_Task_Control;
Tasks call Suspend_Until_True to suspend themselves on some
object of the type passed as the parameter. The call suspends the caller
until that object becomes True. If it is already True, the caller
continues immediately. Objects of type Suspension_Object are
automatically set to False initially, and become True via a call
to Set_True. As part of the return from a call to
Suspend_Until_True, the flag is set back to False. As a result,
you probably only need those two subprograms.
The interrupt handler procedure responds to interrupts, eventually
setting some visible Suspension_Object to True so that the caller
will be signaled and resume. Here's an example showing both the protected
object, with handler, and a Suspension_Object declaration:
with Ada.Interrupts.Names; use Ada.Interrupts.Names;
with Ada.Synchronous_Task_Control; use Ada.Synchronous_Task_Control;
package Gyro_Interrupts is
Data_Available : Suspension_Object;
protected Handler is
pragma Interrupt_Priority;
private
procedure IRQ_Handler
with Attach_Handler => EXTI2_Interrupt;
end Handler;
end Gyro_Interrupts;
In the code above, Gyro_Interrupts.Data_Available is the
Suspension_Object variable visible both to the interrupt handler
PO and the client task.
EXTI2_Interrupt is "external interrupt number 2" on this
particular microcontroller. It is connected to an external device, not
on the SoC itself. Specifically, it is connected to a
L3GD20 MEMS motion sensor,
a three-axis digital output gyroscope. This gyroscope can be
either polled or generate interrupts when ever data are available. The
handler is very simple:
with STM32.EXTI; use STM32.EXTI;
package body Gyro_Interrupts is
protected body Handler is
procedure IRQ_Handler is
begin
if External_Interrupt_Pending (EXTI_Line_2) then
Clear_External_Interrupt (EXTI_Line_2);
Set_True (Data_Available);
end if;
end IRQ_Handler;
end Handler;
end Gyro_Interrupts;
The handler simply clears the interrupt and resumes the caller task via
a call to Set_True on the variable declared in the package spec.
The lack of an entry means that no data can be passed to the task via entry parameters. It is possible to pass data to the task but doing so would require an additional protected procedure or function.
The gyroscope hardware device interface is in package L3GD20. Here
are the pertinent parts:
package L3GD20 is
type Three_Axis_Gyroscope is tagged limited private;
procedure Initialize
(This : in out Three_Axis_Gyroscope;
Port : Any_SPI_Port;
Chip_Select : Any_GPIO_Point);
...
procedure Enable_Data_Ready_Interrupt (This : in out Three_Axis_Gyroscope);
...
type Angle_Rate is new Integer_16;
type Angle_Rates is record
X : Angle_Rate; -- pitch, per Figure 2, pg 7 of the Datasheet
Y : Angle_Rate; -- roll
Z : Angle_Rate; -- yaw
end record with Size => 3 * 16;
...
procedure Get_Raw_Angle_Rates
(This : Three_Axis_Gyroscope;
Rates : out Angle_Rates);
...
end L3GD20;
With those packages available, we can write a simple main program to use the gyro. The real demo displayed the readings on an LCD but we've elided all those irrelevant details:
with Gyro_Interrupts;
with Ada.Synchronous_Task_Control; use Ada.Synchronous_Task_Control;
with L3GD20; use L3GD20;
with STM32.Board;
...
procedure Demo_L3GD20 is
Axes : L3GD20.Angle_Rates;
...
procedure Await_Raw_Angle_Rates (Rates : out L3GD20.Angle_Rates) is
begin
Suspend_Until_True (Gyro_Interrupts.Data_Available);
L3GD20.Get_Raw_Angle_Rates (STM32.Board.Gyro, Rates);
end Await_Raw_Angle_Rates;
...
begin
Configure_Gyro;
Configure_Gyro_Interrupt;
...
loop
Await_Raw_Angle_Rates (Axes);
...
end loop;
end Demo_L3GD20;
The demo is a main procedure, even though we've been describing the
client application code in terms of tasks. The main procedure is
executed by the implicit "environment task" so it all still works.
Await_Raw_Angle_Rates suspends (if necessary) on
Gyro_Interrupts.Data_Available and then calls
L3GD20.Get_Raw_Angle_Rates to get the rate values.
The operations provided by Suspension_Object are faster than
protected entries, and noticeably so. However, that performance
difference is due to the fact that Suspension_Object provides so
much less capability than entries. In particular, there is no notion of
protected actions, nor expressive entry barriers for condition
synchronization, nor parameters to pass data while synchronized. Most
importantly, there is no caller queue, so at most one caller can be
waiting at a time on any given Suspension_Object variable. You'll
get Program_Error if you try. Protected entries should be your
first design choice. Note that the Ravenscar restrictions can make use
of Suspension_Object much more likely.
Final Points¶
As you can see, the semantics of protected objects are a good fit for
interrupt handling. However, other forms of handlers are allowed to be
supported. For example, the compiler and RTL for a specific target may
include support for interrupts generated by a device known to be
available with that target. For illustration, let's imagine the target
always has a serial port backed by a UART. In addition to handlers as
protected procedure without parameters, perhaps the compiler and RTL
support interrupt handlers with a single parameter of type Unsigned_8
(or larger) as supported by the UART.
Overall, the interrupt model defined and supported by Ada is quite close to the canonical model presented by most programming languages, in part because it matches the model presented by typical hardware.